
Software
|
 |
|
Software Related to Parallel Mechanisms |
| Type 1 Singularity Loci of 3-DOF Symmetric Spherical Parallel Mechanisms |
| Version: 1.00 |
 Type1SPMs.zip (6 Kb) Type1SPMs.zip (6 Kb) |
| Last Modified: June 16, 2005 |
|
| Author: Ilian Bonev |
| Requirements: MATLAB 7 |
|
| This program consists of several MATLAB scripts used for plotting the Type 1 singularity loci of 3-DOF spherical parallel mechanisms.
|
|
| Simulation of 3–RRR Planar Parallel Manipulators |
| Version: 1.00 |
RRR.zip (7 Kb) |
| Last Modified: July 20, 2000 |
View a screen shot |
| Author: Ilian Bonev |
| Requirements: MATLAB 5 |
|
| This program consists of several MATLAB scripts used for simulation of 3–RRR
planar parallel manipulators. The program consists essentially of a graphical user interface
that allows the user to define interactively the position and orientation of the mobile platform.
At each change in the pose, the inverse kinematic problem is solved and the new configuration is
plotted. Additionally, at each change in the orientation of the mobile platform, the
constant-orientation workspace is computed and plotted.
|
|
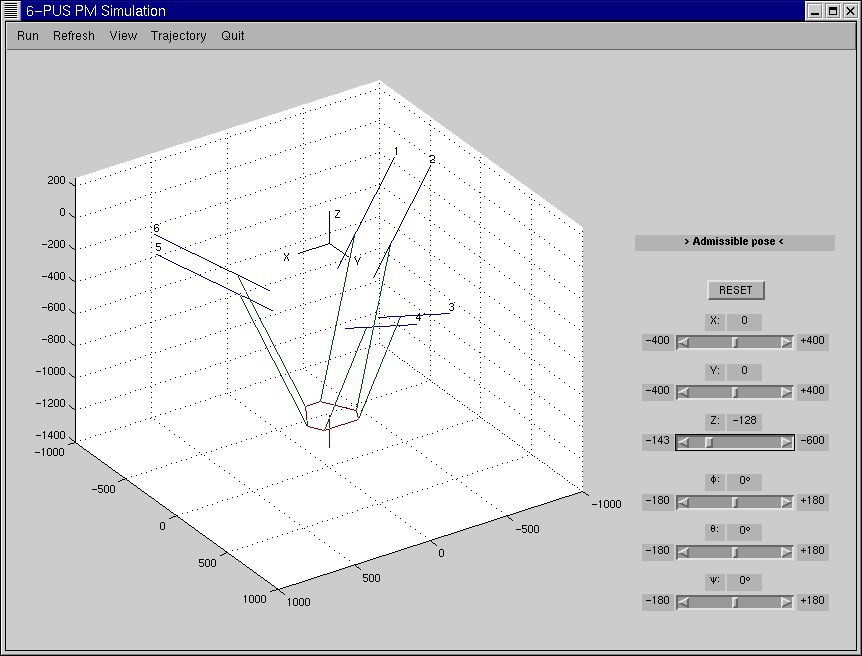
| Simulation of 6–PUS Parallel Manipulators |
| Version: 1.00 |
PUS.zip (9 Kb) |
| Last Modified: July 20, 2000 |
View a screen shot |
| Author: Ilian Bonev |
| Requirements: MATLAB 5 |
|
| This program consists of several MATLAB scripts used for simulation of 6–PUS
parallel manipulators. The program consists essentially of a graphical user interface that allows
the user to define interactively the position and orientation of the mobile platform. At each
change in the pose, the inverse kinematic problem is solved and the new configuration is plotted.
|
|
| CUIK++: An Extension of Branch-and-Prune Techniques for Motion Analysis and Synthesis of Complex Robotic Systems
|
| Version: n/a |
Download |
| Authors: Kinematics and Robot Design Group (IRI, Barcelona) |
| Requirements: Linux or Mac OS |
|
| The CUIK Suite is a software toolbox for the kinematic analysis of general mechanisms involving open or closed kinematic chains. For a given mechanism, the algorithms can compute its configuration space and various singularity loci, the workspace relative to a set of coordinates, and collision- or singularity-free paths between given configurations. The toolbox has been tested on multiple serial and parallel robots, cable-driven robots, robot hands, tensegrity structures, and molecules. It is developed by the Kinematics and Robot Design Group at IRI, Barcelona (Catalonia).
|
|
| Copyright © 2000–2016 by Ilian Bonev |
Last Update: October 20, 2016 |
|
{kind=link}
{kind=link}